Misją Instytutu jest dzialalność naukowo-badawcza prowadząca do nowych rozwiązań technicznych i organizacyjnych użytecznych w kształtowaniu warunków pracy zgodnych z zasadami bezpieczeństwa pracy i ergonomii oraz ustalanie podstaw naukowych do właściwego ukierunkowywania polityki społeczno-ekonomicznej państwa w tym zakresie.




W skład każdego systemu aktywnej redukcji hałasu, oprócz układu sterownika wchodzą również elementy pomiarowe i wykonawcze.
Rolą elementów pomiarowych w systemie aktywnej redukcji hałasu jest przetwarzanie wielkości nieelektrycznych na sygnały elektryczne (zazwyczaj napięcia), które są następnie wykorzystywane w procesie sterowania. Liczba wykorzystywanych w systemie aktywnej redukcji hałasu elementów pomiarowych zależy od rodzaju systemu. W systemie aktywnej redukcji hałasu ze sprzężeniem zwrotnym jest tylko jeden element pomiarowy, zwany przetwornikiem sygnału błędu. W jednokanałowym systemie aktywnej kompensacji dźwięku ze sterowaniem z wyprzedzeniem są dwa elementy pomiarowe zwane odpowiednio: przetwornikiem sygnały błędu i przetwornikiem sygnału odniesienia. Wielokanałowe systemy aktywnej redukcji hałasu wymagają zastosowania większej liczby elementów pomiarowych.
W systemach aktywnej redukcji hałasu jako przetworniki stosuje się następujące elementy:
1. mikrofony,
2. obrotomierze (tachometry),
3. akcelerometry,
4. przetworniki prędkości,
5. przetworniki przemieszczenia,
6. czujniki odkształcenia,
7. synchronizowane przetworniki częstotliwości.
I. Mikrofony
Mikrofony są najczęściej stosowanymi elementami pomiarowymi (przetwornikami) w systemach aktywnej redukcji hałasu. W zależności od warunków w jakich pracuje system aktywnej redukcji hałasu stosowane są różne typy mikrofonów.
W systemach aktywnej redukcji hałasu bazujących na sterownikach cyfrowych płaskość charakterystyki amplitudowej i fazowej nie jest konieczna, gdyż algorytmy identyfikacji i adaptacji nie są na to wrażliwe. Nie ma więc konieczności stosowania w takich systemach drogich mikrofonów o "wyśrubowanych" charakterystykach w zupełności wystarczają mikrofony tanie i łatwo dostępne, jak na przykład elektretowe, czy pojemnościowe.
Jednym z typowych zastosowań układów aktywnych jest redukcja hałasu w systemach przewodach dolotowych maszyn przepływowych (instalacje wentylacyjne, kominowe itp.). Cechą wyżej wymienionych systemów jest występujący w nich przepływ ośrodka propagacji. Przepływ ośrodka powoduje powstawanie turbulencji, których poziom zależy od jego prędkości (wraz ze wzrostem prędkości przepływu zmienia się charakter przepływu z laminarnego dla niewielkich wartości prędkości na coraz bardziej turbulentny). Powstające w wyniku przepływu ośrodka turbulencje powodują, że sygnał pochodzący z mikrofonów jest zakłócony. Wpływ turbulencji na sygnał z mikrofonów można zmniejszyć stosując jeden bądź kilka z poniższych sposobów.
Zastosowanie mikrofonów ze stożkową głowicą przeciwwietrzną (Rys. 1). To rozwiązanie jest dla przypadku, gdy mamy do czynienia z przepływem w określonym kierunku (taka sytuacja występuje w systemach wentylacyjnych)


Rys. 1 Mikrofon ze stożkową głowicą przeciwwietrzną
Zastosowanie mikrofonu w przeciwwietrznej osłonie rurowej (ang. turbulence screen, probe tube microphone) (Rys. 2). Taka osłona tłumi turbulencje w zakresie częstotliwości powyżej częstotliwości odcięcia, która jest równa:
![]() (w.1)
(w.1)
gdzie:
c0 - prędkość dźwięku [m/s],
M - liczba Macha,
L - długość rury, w której umieszczony jest mikrofon [m].

Rys. 2 Mikrofon w przeciwwietrznej osłonie rurowej
Zastosowanie macierzy mikrofonów. Turbulencje propagują z prędkością przepływu ośrodka, więc znacznie wolniej niż fala dźwiękowa. Korzystając z tego faktu można umieścić kilka mikrofonów jeden za drugim w odległości Ls od siebie i sumować sygnały z nich pochodzące po uprzednim opóźnieniu ich na o czas wynikający z propagacji fali akustycznej uzyskamy w ten sposób poprawę stosunku sygnału do zakłóceń pochodzenia turbulencyjnego. Maksymalne stłumienie poziomu turbulencji jakie można uzyskać przy takim podejściu wynosi:
![]() (w.2)
(w.2)
gdzie;
N - liczba mikrofonów.
W tym przypadku - tak jak w poprzednim - tłumienie turbulencji zachodzi jedynie powyżej częstotliwości odcięcia, która jest równa:
![]() (w.3)
(w.3)
gdzie:
c0 - prędkość dźwięku [m/s],
M - liczba Macha,
Ls - odległość pomiędzy sąsiednimi mikrofonami [m],
N - liczba mikrofonów.
W systemach ze sterowaniem z wyprzedzeniem (sprzężeniem w przód) ważne jest eliminowanie wpływu sprzężenia zwrotnego pomiędzy źródłem wtórnym, a przetwornikiem sygnału odniesienia. Sprzężenie to ma negatywny wpływ na stabilność i skuteczność działania systemu aktywnej kompensacji dźwięku i powinno być wyelimin owane lub ograniczone. Można je wyeliminować stosując jako przetwornik sygnału odniesienia element pomiarowy nie będący mikrofonem np. tachometr, akcelerometr. Takie podejście jest możliwe tylko wtedy, gdy sygnał z tego elementu pomiarowego będzie zawierał informację o hałasie emitowanym przez źródło pierwotne, a często tak właśnie jest. Jeżeli źródłem hałasu jest np. wentylator to informacja o prędkości obrotowej (sygnał z obrotomierza) jest wystarczająca. Analogicznie jeżeli źródłem hałasu są drgania strukturalne, to sygnał z akcelerometru dostarcza wystarczających informacji o tym hałasie. Jeżeli nie możliwe jest wyeliminowanie sprzężenia zwrotnego pomiędzy źródłem wtórnym, a przetwornikiem sygnału odniesienia należy je ograniczyć stosując jeden bądź kilka z przedstawionych poniżej sposobów:
1. sterownik systemu zrealizować jako filtr adaptacyjny o nieskończonej odpowiedzi impulsowej (np. struktura RLMS). Sprzężenie akustyczne wprowadza do transmitancji bieguny, które mogą być kompensowane przez bieguny filtru o nieskończonej odpowiedzi impulsowej.
2. jeżeli fala pierwotna propaguje w ściśle określonym kierunku, a tak jest np. w falowodach akustycznych (systemy wentylacyjne itp.) zastosować przetwornik sygnału odniesienia w postaci mikrofonu o takiej charakterystyce kierunkowej, aby zminimalizować stosunek sygnału pochodzącego od źródła wtórnego do sygnału pochodzącego od źródła pierwotnego (Rys. 3).
3. zastosować źródło wtórne, które będzie miało odpowiednią charakterystykę kierunkową (Rys. 3).
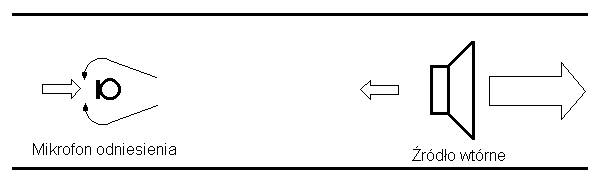
Rys. 3 Pożądane charakterystyki kierunkowe elementu pomiarowego i wykonawczego i wzajemne usytuowanie tych elementów
Sposoby zapewnienia odpowiedniej charakterystyki kierunkowej mikrofonu sygnału odniesienia:
1. Umieszczenie mikrofonu na końcu rurki z wzdłużną szczeliną (Rys. 4),

Rys. 4 Układ poprawiający charakterystykę kierunkową mikrofonu
2. Zastosowanie macierzy mikrofonów. W praktyce sprowadza to się do zastosowania dwóch mikrofonów oddalonych od siebie o odległość d. Zakres częstotliwości, dla których taki układ mikrofonów ma charakterystykę kierunkową opisuje następująca nierówność:
![]() (w.4)
(w.4)
gdzie:
f - częstotliwość [Hz],
c - prędkość dźwięku [m/s],
d - odległość miedzy mikrofonami [m].
3. Zastosowanie mikrofonu gradientowego. Mikrofony takie nie nadają się do układów, w których występuje przepływ ośrodka.
Ponadto jeżeli mikrofony mają być stosowane w trudnych warunkach (zanieczyszczenia, duża wilgotność, wysoka temperatura itp.) muszą być specjalnie zabezpieczane przez działaniem tych czynników.
Innymi ważnymi parametrami mikrofonów, które mają być stosowane w systemach aktywnej redukcji hałasu są:
- maksymalny poziom ciśnienia akustycznego, który ogranicza zastosowanie mikrofonu tylko do takich miejsc, w których poziom ciśnienia akustycznego nie przekracza tej wartości,
- stosunek sygnał szum, od którego zależy skuteczność systemu aktywnej redukcji hałasu (uzyskana skuteczność będzie na pewno mniejsza od tej wartości).
II. Obrotomierze (tachometry)
Ten rodzaj przetworników stosowany jest w przypadku, gdy źródłem hałasu są urządzenia wyposażone w elementy wirujące (np. w wentylatorach). Jeżeli hałas, którego źródłem są elementy wykonujące ruch obrotowy jest dominujący, to widmo hałasu tego typu urządzeń ma charakter prążkowy (energia akustyczna skupiona jest w wąskich pasmach wokół pewnych częstotliwości), a położenie prążków jest ściśle powiązane z prędkością obrotową elementów wirujących. Obrotomierze stosuje się przede wszystkim jako przetworniki sygnału odniesienia w systemach aktywnej redukcji hałasu w instalacjach wentylacyjnych i kominowych, w których głównym źródłem hałasu jest wentylator.
III. Akcelerometry
Ten rodzaj przetworników stosowany jest stosowany jest, gdy źródłem hałasu są elementy drgające. Akcelerometry stosuje się na przykład w systemach aktywnej redukcji hałasu transformatorów energetycznych jako przetwornik sygnału odniesienia. W transformatorze energetycznym źródłem emitującym hałas do środowiska jest drgająca obudowa.
IV. Przetworniki prędkości, przetworniki przemieszczenia i czujniki odkształcenia
Stosowane są głównie w systemach aktywnej redukcji drgań i wibracji. Aktywna redukcja drgań jest również pośrednio metodą redukcji hałasu pochodzącego od elementów drgających. Aktywną redukcję drgań transformatorów energetycznych stosuje się jako sposób globalnej redukcji hałasu emitowanego przez transformator. Stosowanie różnego typu elementów pomiarowych wymaga, aby system aktywnej redukcji hałasu zawierał odpowiednie dla tych typów przetworników układy wzmacniaczy wejściowych. Zadaniem tych układów jest dopasowanie impedancyjne elementów pomiarowych do reszty systemu oraz odpowiednie wzmocnienie i wstępna obróbka sygnałów elektrycznych pochodzących z tych elementów. Bardzo rzadko zdarza się, aby sygnał bezpośrednio z elementu pomiarowego mógł być podawany na przetwornik analogowo-cyfrowy.
V. Synchronizowane przetworniki częstotliwości
Niekiedy możliwe jest pobranie jako sygnału odniesienia sygnału. Czynnikiem bezpośrednio związanym z powstawaniem hałasu w transformatorach jest częstotliwość napięcia elektrycznego. W układach aktywnej redukcji transformatorów możliwe jest pobranie z sieci sygnału odniesienia po odpowiednim dopasowaniu. Do tego służą właśnie układy synchronizacji fazy i przetworniki częstotliwości.
Rolą elementów wykonawczych (źródeł wtórnych) w systemie aktywnej redukcji hałasu jest przetworzenie elektrycznego sygnału wyjściowego ze sterownika na odpowiednią wielkość nieelektryczną. W systemach aktywnej redukcji dźwięku jako źródła wtórne stosuje się następujące elementy:
1. głośniki i systemy głośnikowe,
2. siłowniki piezoelektryczne (elektrostrykcyjne),
3. siłowniki hydrauliczne,
4. siłowniki pneumatyczne,
5. siłowniki elektrodynamiczne i elektromagnetyczne,
6. siłowniki magnetostrykcyjne,
7. siłowniki oparte na stopach z pamięcią.
VI. Głośniki
Głośniki i systemy głośnikowe są najczęściej stosowanymi w systemach aktywnej redukcji hałasu elementami wykonawczymi. W zależności od warunków pracy stosowane są różne rodzaje głośników i systemów głośnikowych. Mimo tej różnorodności rodzajów głośników i stawianych im wymagań można wyodrębnić grupę cech, które powinny posiadać głośniki do zastosowań w systemach aktywnej redukcji hałasu. Cechy te wynikają ze specyfiki pracy głośników jako źródeł wtórnych w systemach aktywnej redukcji hałasu, a są to:
1. długa żywotność. Najczęściej systemy aktywnej redukcji hałasu pracują w sposób ciągły i dlatego elementy wykonawcze powinny się charakteryzować możliwie długą żywotnością.
2. wysoka efektywność przetwarzania energii elektrycznej na energią akustyczną.
3. odporność na działanie czynników zewnętrznych takich jak zanieczyszczenia, duża wilgotność, wysoka temperatura itp.
4. dużą prędkością objętościową w zakresie niskich częstotliwości.
Prędkość objętościowa źródła q [m3/s] jest proporcjonalna do częstotliwości emitowanej fali akustycznej oraz wychylenia objętościowego Vd [m3]. Zapewnienie dużej prędkości objętościowej przy niskich częstotliwościach (zakres niskich częstotliwości jest typowym zakresem stosowania metod aktywnych) wymaga dużych wartości wychylenie objętościowe Vd [m3], będącego iloczynem liniowego przemieszczenia membrany X [m] i powierzchni efektywnej membrany Sd [m2]. Maksymalne wychylenie objętościowe Vdmax [m3] uzyskuje się dla maksymalnej wartości liniowego przemieszczenia membrany Xmax [m]. Duże wychylenie objętościowe umożliwia uzyskanie dużej wartości emitowanej mocy akustycznej, a co za tym idzie dużych poziomów ciśnienia akustycznego.
Przy danej mocy akustycznej emitowanej przez głośnik można zwiększyć poziom ciśnienia na wyróżnionych kierunkach poprzez zastosowanie źródeł kierunkowych.
Reasumując z wymaganej dużej wartości prędkości objętościowej wynika konieczność stosowania głośników o dużej powierzchni efektywnej membrany Sd i dużym maksymalnym liniowym wychyleniu membrany Xmax (wychylenia membrany nieznacznie powyżej Xmax są możliwe ale powodują znaczny wzrost zniekształceń nieliniowych i mogą doprowadzić do uszkodzenia głośnika).
Jeżeli okaże się, że wymagana (wynikająca z cech fizycznych systemu) prędkość objętościowa źródła wtórnego jest nieosiągalna za pomocą głośnika można zastosować jeden z poniższych wariantów:
1. Zastosować większą liczbę głośników (np. instalując kilka głośników na obwodzie kanału wentylacyjnego.
2. Zamiast cewki i magnesu zastosować szybki i o niskiej bezwładności siłownik na prąd stały. Trzeba zastosować przejście z ruchu obrotowego na posuwisto zwrotny. Siłownik o niskiej bezwładności i możliwości obrotu w obu kierunkach jest w stanie dobrze odtwarzać sygnały akustyczne do 130 Hz. Maksymalne liniowe przemieszczenie dla tego typu układu wynosi około 15 mm (dla głośników typowo 8 mm lub mniej) (Leventhall, 1988). Na rynku dostępne są głośniki tego typu o efektywności 130 dB/1 m w zakresie 30-130 Hz i 114 dB/1 m dla 16 Hz przy mocy elektrycznej 400 W i zniekształceniach harmonicznych poniżej 2% (Intersonics Inc.).
3. Zastosowanie urządzenia, które jest źródłem modulowanej strugi powietrza. Urządzenie to kieruje dużą objętość powietrza poprzez szczelinę o regulowanym rozmiarze. Rozmiar szczeliny regulowany jest najczęściej siłownikiem. Tego typu urządzenia charakteryzują się małą skutecznością akustyczną i powinny być używane z odpowiednio zaprojektowaną tubą poprawiającą skuteczność promieniowania.
4. Zastosowanie do głośnika odpowiedniej tuby poprawiającej dopasowanie i zwiększającej efektywności w wybranym zakresie częstotliwości. Zastosowanie tuby powoduje duże nierówności charakterystyki amplitudowej i fazowej, co sprawia, że aktywna redukcja dźwięku w szerokim zakresie częstotliwości jest bardzo trudna.
5. Zaprojektowanie i odpowiednie dostrojenie do wymaganego zakresu częstotliwości zestawu głośnikowego (najczęściej w obudowie z otworem lub pasmowo przepustowej).
W systemach aktywnej redukcji hałasu, w których należy ograniczyć wpływ sprzężenia zwrotnego pomiędzy źródłem wtórnym a mikrofonem sygnału odniesienia oprócz mikrofonu kierunkowego stosuje się również źródła kierunkowe. Zastosowanie kierunkowego źródła wtórnego jeszcze bardziej osłabia to sprzężenie. Najczęściej jako źródła kierunkowe stosuje się źródła monopolowe (dipolowe, tripolowe itp.).
VII. Siłowniki piezoelektryczne (elektrostrykcyjne)
W oparciu o siłowniki piezoceramiczne wykonuje się wysokosprawne i odporne na warunki atmosferyczne źródła wtórne do zastosowania przy aktywnej redukcji hałasu dużych transformatorów energetycznych. Źródło takie wykonane jest w postaci obudowy zamkniętej, w której rolę membrany pełni wygięta płyta metalowa pobudzana do drgań za pomocą siłowników piezoelektrycznych (Rys. 5). Takie źródło wykorzystując zjawiska rezonansowe bardzo efektywnie emituje dźwięk na częstotliwościach rezonansowych płyty, które są ponadto wzmacniane przez obudowę. Źródło takie może bardzo efektywnie emitować fale akustyczne na częstotliwościach będących parzystymi harmonicznymi częstotliwości sieci energetycznej. Zastosowane elementy sprawiają, iż jest ono odporne na działanie warunków atmosferycznych. Wymiary takiego źródła są tak dobierane, aby uzyskać wymagane parametry.
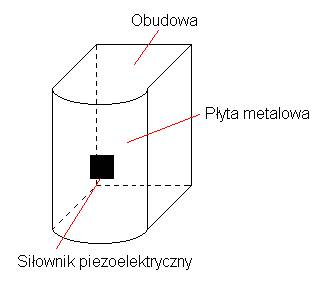
Rys. 5 Element wykonawczy z siłownikiem piezoelektrycznym
Aby uzyskać globalną redukcję hałasu emitowanego przez transformator energetyczny należy tłumić drgania obudowy transformatora, które są źródłem hałasu. Mamy wtedy do czynienia z aktywnym tłumieniem drgań. W aktywnym tłumieniu drgań jako źródła wtórne wykorzystywane są np. siłowniki piezoelektryczne. Aktywna redukcja hałasu transformatora energetycznego wymaga stosowania dużej liczby źródeł wtórnych i umożliwia jedynie redukcję hałasu emitowanego na pewnych kierunkach (w określonym kącie bryłowym). Na innych kierunkach hałas wzrasta.
Siłowniki hydrauliczne, siłowniki pneumatyczne, siłowniki elektrodynamiczne i elektromagnetyczne, siłowniki magnetostrykcyjne, siłowniki oparte na stopach z pamięcią. Tego typu siłowniki stosowane są głównie w aktywnej redukcji drgań i wibracji, która pośrednio jest metodą redukcji hałasu pochodzącego od elementów drgających.
Sterowanie elementami wykonawczymi wymaga stosowania odpowiednich urządzeń wzmacniających, różnych dla różnych rodzajów elementów wykonawczych. Wzmacniacz powinien być dopasowany do charakteru obciążenia i sposobu sterowania elementu wykonawczego. Inny wzmacniacz powinien być zastosowany do sterowania siłownikiem piezoelektrycznym, który stanowi obciążenie o charakterze pojemnościowym i powinien być sterowany napięciowo, a inny do sterowania głośnikiem.
© 2002-2004 Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy www.anc.pl, www.ciop.pl



|
Klauzula RODO Dostępność cyfrowa Copyright © Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy Wszelkie prawa do udostępnianych utworów są zastrzeżone, z zastrzeżeniem wyłączenia tych utworów, które udostępniane są w trybie otwartego dostępu – na podstawie licencji Creative Commons CC-BY ND 4.0. Kopiowanie w celu rozpowszechniania fragmentów lub całości pozostałych materiałów jest zabronione. Udostępnione materiały można kopiować zarówno we fragmentach jak i w całości wyłącznie na użytek własny. |