Misją Instytutu jest dzialalność naukowo-badawcza prowadząca do nowych rozwiązań technicznych i organizacyjnych użytecznych w kształtowaniu warunków pracy zgodnych z zasadami bezpieczeństwa pracy i ergonomii oraz ustalanie podstaw naukowych do właściwego ukierunkowywania polityki społeczno-ekonomicznej państwa w tym zakresie.



AKTYWNA REDUKCJA HAŁASU W FALOWODZIE AKUSTYCZNYM Z ZASTOSOWANIEM SZTUCZNYCH SIECI NEURONOWYCH
Active noise reduction in an acoustic duct using artificial neural networks
Leszek Morzyński, lmorzyns@ciop.pl
Grzegorz Makarewicz, grmak@ciop.pl
Centralny Instytut Ochrony Pracy
Central Institute for Labour Protection
Czerniakowska16, 00-701 Warszawa
W artykule przedstawiono system aktywnej redukcji hałasu w falowodzie akustycznym oparty na sztucznej sieci neuronowej. W systemie tym wykorzystano skonstruowany w Centralnym Instytucie Ochrony Pracy niskobudżetowy układ sterujący zbudowany na bazie komputera PC. W układzie tym zaimplementowano sieć neuronową ze standardowym algorytmem wstecznej propagacji błędów. Podstawowym celem było określenie, czy taki układ sterujący będzie odpowiedni do zastosowania w rzeczywistym układzie aktywnej redukcji hałasu opartym na sieci neuronowej. System z zaimplementowaną siecią neuronową został wstępnie przebadany na stanowisku laboratoryjnym. W artykule zaprezentowano uzyskane wyniki pomiarów oraz konstrukcję układu sterującego. Wyniki badań potwierdziły użyteczność niskobudżetowego układu sterującego w systemie aktywnej redukcji hałasu opartym na sieci neuronowej.
In this paper, a system for active noise control (ANC) in an acoustic duct based on artificial neural network is described. In this system a PC-based low-cost control unit made in Central Institute for Labour Protection is used. A neural network with standard back propagation algorithm was implemented in this unit The main aim of the present study was to verify if this control unit was suitable for a neural network-based ANC system. After the implementation of the neural network, some preliminary measurements of the system were made on a laboratory stand. Results of measurements and the construction of the control unit are described in this paper. Experiments confirmed that the use of the low-cost controller in the neural network-based ANC system can give good results.
1. WPROWADZENIE
Sztuczne sieci neuronowe są obecnie rzadko wykorzystywane w układach aktywnej kompensacji dźwięku. W porównaniu do najczęściej wykorzystywanych transwersalnych filtrów o skończonej odpowiedzi impulsowej (SOI) są dość wolne i wymagają większych mocy obliczeniowych. Jednak w przypadku niektórych systemów aktywnej redukcji hałasu sieci neuronowe mogą być bardzo użyteczne. Chodzi o systemy, w których znaczącą rolę odgrywają zjawiska nieliniowe. W takich systemach zastosowanie transwersalnego filtru SOI, który jest filtrem liniowym, będzie często prowadziło do destabilizacji systemu. Rozwiązaniem jest właśnie zastosowanie sieci neuronowej, która jako filtr nieliniowy może poprawnie modelować nieliniowe transmitancje układu.
W większości układów opartych na sieciach neuronowych wykorzystuje się drogie, specjalizowane procesory sygnałowe. Obecnie moc obliczeniowa zwyczajnych komputerów typu PC wydaje się być wystarczająca do zbudowania układu aktywnej redukcji hałasu działającego w oparciu o sieć neuronową.
W Centralnym Instytucie Ochrony Pracy skonstruowano w oparciu o komponenty komputera PC niskobudżetowy, uniwersalny układ sterujący do zastosowania w systemach aktywnej redukcji hałasu. W układzie tym zaimplementowano szereg różnego rodzaju filtrów i algorytmów adaptacji. Aby określić, czy wspomniany układ sterujący nadaje się do wykorzystania w systemie aktywnej redukcji hałasu opartym na sieci neuronowej, zaimplementowano w nim sieć neuronową i przeprowadzono szereg badań wstępnych na istniejącym stanowisku laboratoryjnym. Zaimplementowana sieć neuronowa jest siecią jednokierunkową wielowarstwową (z jedną warstwą neuronów w warstwie ukrytej). [2, 5, 6]. Warstwę wejściową sieci tworzy bufor N ostatnich próbek sygnału odniesienia. Algorytmem uczenia sieci jest standardowy algorytm wstecznej propagacji błędów [2, 5, 6].
Proces implementacji sieci neuronowej i uruchamiania układu na stanowisku laboratoryjnym został poprzedzony badaniami symulacyjnymi w środowisku Matlab, których celem było określenie zachowania się układu aktywnej redukcji w zależności od różnych parametrów tego układu i sieci neuronowej. Sprawdzano jaki wpływ na działanie układu ma ilość neuronów w warstwie wejściowej i ukrytej, wartość współczynnika uczenia sieci, transmitancja kanału akustycznego, itp. Podczas symulacji nie korzystano z gotowych pakietów narzędziowych Matlaba. Kod programu symulacyjnego napisano w ten sposób, że po niewielkich zmianach został przeniesiony bezpośrednio do urządzenia sterującego. Przeprowadzone symulacje okazały się bardzo pomocne na etapie uruchamiania układu laboratoryjnego gdyż pozwalały stwierdzić czy dane zachowanie układu wynika z jego właściwości, czy może jest przyczyną błędów programistycznych i konstrukcyjnych. Wyniki badań symulacyjnych zostały szerzej omówione w literaturze [1, 4].
2. UKŁAD STERUJĄCY
Przedstawiony na Rys. 1 uniwersalny układ sterujący zbudowany jest w oparciu o komponenty komputera typu PC zamknięte w dziewiętnastocalowej obudowie przemysłowej. Do akwizycji danych analogowych i generowania sygnałów sterujących zastosowano kartę przetworników A/C i C/A typu CIO-DAS08/JR-AO produkcji ComputerBoards. Posiada ona osiem niezależnych wejść analogowych próbkowanych z częstotliwością 20kHz i dwa niezależne wyjścia analogowe. Oba rodzaje kanałów pracują z rozdzielczością 12 bitów a zakres napięć wejściowych i wyjściowych wynosi ±5V. Układ sterujący posiada także wbudowany siedmiocalowy monitor monochromatyczny. Monitor ten umożliwia obsługę i programowanie urządzenia w warunkach rzeczywistych. W warunkach laboratoryjnych lepszą ergonomię w trakcie programowania zapewnia podłączany do urządzenia monitor zewnętrzny. Układ sterujący pracuje pod kontrolą systemu operacyjnego DOS.
Integralną częścią systemu aktywnej redukcji jest zaprezentowane również na Rys. 1 urządzenie pomiarowo-wykonawcze. Urządzenie pozwala na dopasowanie (poprzez wzmocnienie bądź stłumienie) amplitud sygnałów wejściowych do zakresu napięć wejściowych przetwornika A/C. Ponadto urządzenie zawiera filtry antyaliasingowe (dla kanałów wejściowych) i rekonstrukcyjne (dla kanałów wyjściowych) oraz dwa wzmacniacze mocy do sterowania źródłami kompensującymi. Urządzenie pomiarowo-wykonawcze łączone jest ze sterownikiem za pomocą złącza o 32 stykach.
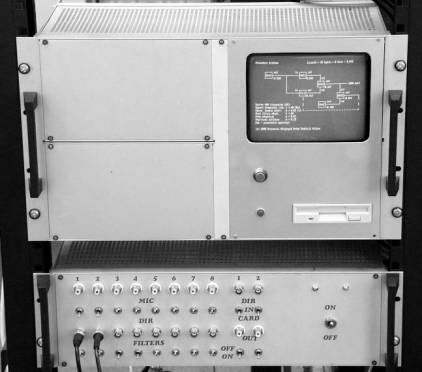
Rys.1. Uniwersalny układ sterujący (u góry) i urządzenie pomiarowo-wykonawcze (u dołu)
Ważnym elementem układu sterującego jest jego oprogramowanie. Zostało ono napisane w języku C++ z niezbędnymi wstawkami w kodzie maszynowym. Składa się ono z biblioteki klas przeznaczonych do obliczeń symulacyjnych oraz z biblioteki funkcji i klas przeznaczonych do sterowania funkcjami kontrolera w czasie rzeczywistym. Obie biblioteki są ze sobą skojarzone poprzez dziedziczenie. Odpowiednie klasy definiują urządzenia i elementy takie jak generatory, wzmacniacze, filtry, sieć neuronowa, algorytmy adaptacji itd. Praca w trybie czasu rzeczywistego jest możliwa dzięki funkcjom umożliwiającym przeprogramowanie układów zegara i kontrolera przerwań komputera. W skład zestawu funkcji przeznaczonych do pracy w trybie czasu rzeczywistego wchodzą również funkcje sterujące pracą karty przetworników A/C i C/A. W razie potrzeby mogą zostać uzupełnione o funkcje obsługi kart innego typu niż obecnie używana bez potrzeby przerabiania całego oprogramowania. Dokładniejszy opis struktury oprogramowania układu sterującego można znaleźć w literaturze [3]
3. POMIARY NA STANOWISKU LABORATORYJNYM
Pomiary skuteczności układu aktywnej redukcji hałasu opartego na sieci neuronowej zostały przeprowadzone na istniejącym w Pracowni Aktywnych Metod Redukcji Hałasu CIOP stanowisku laboratoryjnym, którego głównym elementem jest falowód akustyczny o długości 3m. Schemat układu pomiarowego przedstawiony jest na Rys. 2.
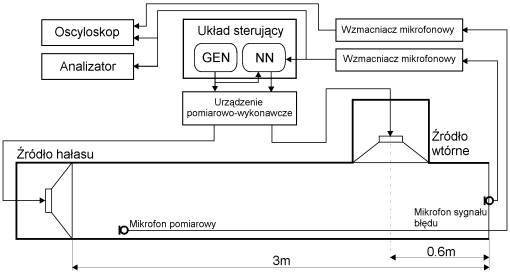
Rys. 2. Schemat blokowy układu pomiarowego
Falowód wykonany jest z rezoteksu o grubości 2.5cm a jego przekrój jest kwadratem o boku długości 56cm. Od wewnątrz wyłożony jest materiałem tłumiącym o grubości 5cm. Początek falowodu zamknięty jest obudową mieszczącą głośnik ustawiony równolegle do osi falowodu. W układzie badawczym pełni on rolę źródła hałasu. U wylotu falowodu w odległości 0.6m od końca umieszczony jest prostopadle do osi falowodu głośnik pełniący rolę źródła kompensującego. W układzie pomiarowym układ sterujący pełnił jednocześnie rolę generatora sygnału hałasu. Sygnał odniesienia dla sieci neuronowej był pobierany bezpośrednio z tego generatora.
Badania laboratoryjne rozpoczęto od testów układu opartego na sieci z dwoma neuronami w warstwie wejściowej i dwoma neuronami w warstwie ukrytej. W kolejnych etapach badań sukcesywnie zwiększano stopień złożoności sieci neuronowej aż do osiągnięcia kresu możliwości układu sterującego w obecnej formie. Najbardziej rozbudowana sieć neuronowa posiadała trzydzieści neuronów warstwie wejściowej i trzy neurony w warstwie ukrytej. W trakcie badań nie uwzględniano wpływu transmitancji ścieżki sygnału błędu. Algorytm uczenia uwzględniający tą transmitancję wymaga mocy obliczeniowej przekraczającej możliwości układu sterującego.
Działanie układu aktywnej redukcji hałasu testowano dla różnego typu sygnałów hałasu. Podstawowym jego rodzajem w trakcie badań wstępnych był pojedynczy ton o zmienianej częstotliwości. Na Rys. 3. przedstawiono wyniki działania układu aktywnej redukcji dla hałasu tego typu.
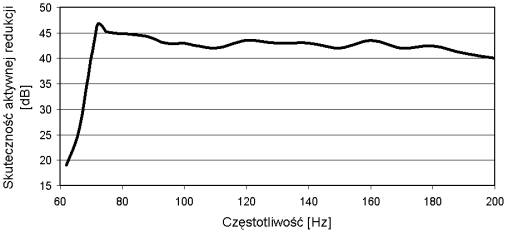
Rys. 3. Skuteczność aktywnej redukcji hałasu dla sygnałów sinusoidalnych
Poziom ciśnienia akustycznego hałasu u wylotu falowodu przy wyłączonym układzie aktywnej redukcji wynosił 100dB. Na Rys. 3 pokazano skuteczność aktywnej redukcji zdefiniowaną jako różnica poziomów ciśnienia akustycznego przed i po włączeniu układu aktywnej redukcji. Poziom ciśnienia akustycznego u wylotu falowodu był obniżany o ponad 40dB osiągając poziom tła akustycznego w pomieszczeniu. Układ działał poprawnie w zakresie częstotliwości od około 60Hz do 200Hz, dla których osiągnięto kres możliwości obliczeniowych układu sterującego.
W kolejnych etapach badań laboratoryjnych badano też zdolność układu do tłumienia hałasu w postaci sumy dwóch tonów. Przykład działania układu dla tego typu hałasu pokazano na Rys. 4.
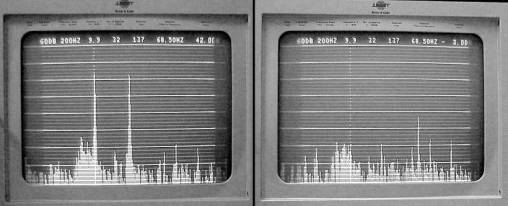
Rys. 4. Widmo amplitudowe sygnału hałasu przed (z lewej) i po włączeniu (z prawej) układu aktywnej redukcji hałasu.
W przykładzie tym hałas będący sumą dwóch tonów o częstotliwościach 69Hz i 103Hz został wytłumiony do poziomu tła akustycznego.
W trakcie badań stwierdzono, że działanie układu zależy od różnicy częstotliwości tonów składowych sygnału hałasu. Przy zbyt dużych różnicach częstotliwości następowała utrata stabilności układu. Ma to zapewne związek z nieuwzględnieniem w algorytmie uczenia transmitancji ścieżki sygnału błędu.
4. PODSUMOWANIE
Uzyskane rezultaty badań potwierdzają możliwość budowy układu aktywnej redukcji hałasu opartego na sieci neuronowej z zastosowaniem niskobudżetowego układu sterującego, zbudowanego w oparciu o komponenty komputera PC. Zaprezentowane rozwiązanie pozwoliło na implementację sieci neuronowej mającej trzydzieści neuronów w warstwie wejściowej i trzy neurony w warstwie ukrytej, uczonej zgodnie z algorytmem wstecznej propagacji błędów. Zastosowanie tego układu pozwoliło na redukcję hałasu w postaci pojedynczego tonu dochodzącą do 45dB w przedziale częstotliwości od 60 do 200Hz. W układzie uzyskano również znaczącą redukcję hałasu będącego sumą dwóch tonów.
Praca została wykonana w ramach grantu promotorskiego nr. 5T07B04022.
LITERATURA
1. ENGEL Z., MAKAREWICZ G., MORZYŃSKI L., ZAWIESKA W., Metody aktywne redukcji hałasu, CIOP, Warszawa, (2001).
2. HANSEN C.H., SNYDER S.D., Active Control of Noise and Vibration, E & FN Spon, London (1997).
3. MAKAREWICZ G., MORZYŃSKI L., ZAWIESKA W.,: Zastosowanie programowania obiektowego do symulacji systemów aktywnej redukcji hałasu, Materiały V Szkoły Metody Aktywne Redukcji Drgań i Hałasu, 195 – 202, (2001).
4. MORZYŃSKI L., MAKAREWICZ G., System aktywnej redukcji hałasu z zastosowaniem sieci neuronowych, Materiały V Szkoły Metody Aktywne Redukcji Drgań i Hałasu, 219 – 224, (2001).
5. NAŁĘCZ M., DUCH W., KORBICZ J., RUTKOWSKI L., TADEUSIEWICZ R., Biocybernetyka i inżynieria medyczna, Tom. 6, Sieci neuronowe, EXIT, Warszawa (2000)
6. RUTKOWSKI L., Filtry adaptacyjne i adaptacyjne przetwarzanie sygnałów, WNT, Warszawa (1994)
© 2002-2004 Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy www.anc.pl, www.ciop.pl



|
Klauzula RODO Dostępność cyfrowa Copyright © Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy Wszelkie prawa do udostępnianych utworów są zastrzeżone, z zastrzeżeniem wyłączenia tych utworów, które udostępniane są w trybie otwartego dostępu – na podstawie licencji Creative Commons CC-BY ND 4.0. Kopiowanie w celu rozpowszechniania fragmentów lub całości pozostałych materiałów jest zabronione. Udostępnione materiały można kopiować zarówno we fragmentach jak i w całości wyłącznie na użytek własny. |