Misją Instytutu jest dzialalność naukowo-badawcza prowadząca do nowych rozwiązań technicznych i organizacyjnych użytecznych w kształtowaniu warunków pracy zgodnych z zasadami bezpieczeństwa pracy i ergonomii oraz ustalanie podstaw naukowych do właściwego ukierunkowywania polityki społeczno-ekonomicznej państwa w tym zakresie.



STEROWANIE KIERUNKOWOŚCIĄ ŹRÓDŁA DŹWIĘKU
DIRECTIVITY CONTROL OF SOUND SOURCE
Paweł Górski,
Centralny Instytut Ochrony Pracy, Warszawa ul. Czerniakowska 16
e-mail: pawel@ciop.pl
SUMMARY
The author presents the possibility of improving listening and hearing conditions by changing the directional response pattern of sound source. Modelling the directivity pattern is used in compound sources and consists in impulse response shaping of a room of a single source. This paper describes a simple approach using a simulation in the Matlab program.
WPROWADZENIE
Na klimat akustyczny składa się między innymi: poziom odsłuchu, subiektywne odczucie lokalizacji źródła dźwięku, zrozumiałość mowy, dlatego wraz ze zmianą charakterystyki kierunkowej będzie następowała zmiana klimatu akustycznego. Najczęściej badania prowadzone są na drodze symulacyjnej z obliczeniem splotu odpowiedzi impulsowej pomieszczenia z przebiegiem czasowym sygnału źródła. Odpowiedź impulsowa pomieszczenia jest ściśle związana z położeniem źródła i odbiornika, oraz zależy od charakterystyki kierunkowej źródła. Obliczenie odpowiedzi impulsowej przy użyciu źródła wszechkierunkowego powoduje, że po wykonaniu operacji splotu odpowiedzi impulsowej z przebiegiem czasowym sygnału źródła otrzymuje się sygnał odbiegający od oryginalnego. Zmniejszenie tych błędów można osiągnąć obliczając odpowiedź impulsową pomieszczenia dla źródła o charakterystyce kierunkowej zbliżonej do charakterystyki kierunkowej źródła oryginalnie emitującego dźwięk. O zmianę charakterystyki kierunkowej można się pokusić jedynie w przypadku źródeł złożonych.
SFORMUŁOWANIE PROBLEMU
W celu poprawienia klimatu akustycznego odsłuchiwanego dźwięku zasymulowano przewidywany kształt odpowiedzi impulsowej w maksymalnie uproszczony sposób. Zadaniem programu było, mając jako dane miedzy innymi: geometrię, ilość źródeł, zadane kierunek i amplitudę, symulowanie odpowiedzi impulsowych drogi transmisji sygnału, przebiegów czasowych, charakterystyk amplitudowo – częstotliwościowych danego źródła dźwięku w zadanych punktach. Symulacje miały za zadanie uproszczenie fazy projektowania stałych parametrów układów akustycznych źródeł złożonych. W pracy modelowano odpowiedzi impulsowe zaczynając od najprostszej postaci ograniczonej delty Diraca kolejno uwzględniając dodatkowe elementy rzeczywistej odpowiedzi impulsowej. Zbadano i oceniono wpływ zmian na charakterystyki kierunkowe układu głośników przez zmiany zamodelowania odpowiedzi impulsowych. Symulacji dokonano w programie napisanym z wykorzystaniem pakietu Matlab. Program podzielono na moduły wykonujące zadane operacje, w którym zasymulowano zestaw cztero-głośnikowy.
SYMULACJE
Pierwszy moduł odczytuje zmierzone doświadczalnie przykładowe odpowiedzi impulsowe transmisji sygnału pojedynczego źródła. Odpowiedzi impulsowe zmierzone są w odległości 2 m od środka układu (rys. 2)co 22,50. Następnie program na wykresach rysuje przebiegi czasowe odpowiedzi i ich charakterystyki widmowe w zadanych kierunkach dla pojedynczego źródła oraz symuluje charakterystyki układu o wielu źródłach. Odpowiedzi zmierzone są w dwóch płaszczyznach pionowej i poziomej. W swoich obliczeniach program bierze pod uwagę: ilość źródeł dźwięku, zmianę kąta pomiędzy osią główną a punktem pomiarowym każdego zamodelowanego źródła, zamianę amplitudy i opóźnienie czasowe. Następnie program oblicza i rysuje wypadkowe charakterystyki amplitudowe i częstotliwościowe modelowanego układu co zadany kąt. Charakterystyki te służą do porównania w wynikami symulacji odpowiedzi impulsowych.
Sposób symulacji odpowiedzi impulsowych układu głośników oparty jest na podstawie obserwacji rzeczywistych odpowiedzi impulsowych rys. 1. Odpowiedź impulsowa całego zestawu głośnikowego może być zastąpiona prostym sumowaniem składowych odpowiedzi impulsowych pojedynczych źródeł dźwięku z tego zestawu. Na wykresie zmierzona charakterystyka częstotliwościowa dla zestawu głośników praktycznie nie różni się od teoretycznie obliczonej przez proste sumowanie odpowiedzi impulsowych. Różnice występujące pomiędzy tymi charakterystykami w badanym zakresie wynoszą poniżej 2 dB, czyli poniżej możliwości usłyszenia różnicy przez przeciętnego słuchacza.
rys. 1 Charakterystyki częstotliwościowe głośników VIFA
Nie jest jednak to całkowitą prawdą, ponieważ do ok. 100 Hz rzeczywisty poziom ciśnienia akustycznego jest wyższy niż wynikałby z sumowania. Może to być spowodowane tym, że przy większych długościach fali poszczególne głośniki wpływają na siebie „jakby ułatwiając sobie pracę” dlatego też, głośniki te wykazują mniejsze zużycie energii na straty własne, a co za tym idzie większym poziomem ciśnienia akustycznego. Mimo tych nieścisłości założenie prostego sumowania można bez obawy przyjąć, ponieważ badane i symulowane głośniki mają znacznie węższe pasmo przenoszenia.
W symulacjach układ głośników i punkty pomiarowe przyjęto tak samo jak były mierzone rzeczywiste charakterystyki tzn. według rys. 2.
rys. 2 Schemat modelowania zestawu głośników i punktów pomiarowych
W module drugim przyjęto model odpowiedzi impulsowej jako odpowiedź impulsową idealnego układu tzn. nie zmieniającego charakterystyki sygnału wejściowego. Zmiana charakterystyki układu wynika jedynie z różnicy odległości pomiędzy źródłami dźwięku w modelowanym układzie. Moduł modeluje impuls tzw. „zerowy”, a następnie zależnie od położenia w stosunku do źródła modyfikuje go. Bierze pod uwagę odległość od źródła dźwięku (tzn. zmianę amplitudy i opóźnienie fazowe), zmianę kąta między osią główną a punktem pomiarowym.
Impuls przyjęty jako delta Diraca o skończonej wysokości jest najprostszym modelem odpowiedzi impulsowej. Na rys. 3 w drugiej kolumnie pokazano wynik takiego założenia. Mimo, że charakterystyki są znacznie uproszczone bez trudu możemy znaleźć analogie z charakterystykami układu rzeczywistego przedstawionymi na rys. 3 w pierwszej kolumnie. Wraz ze wzrostem kąta odchylenia rośnie ilość antyrezonansów i „przesuwają” się one w kierunku niskich częstotliwości. Można powiedzieć, że jest to prawidłowa droga w celu zamodelowania takiej odpowiedzi.
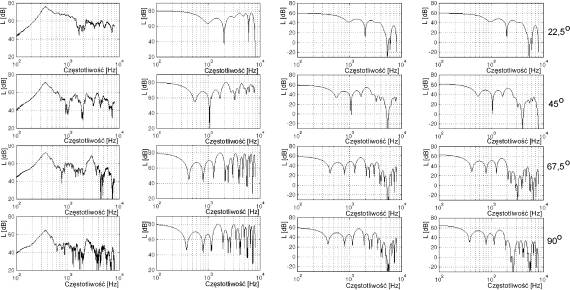
rys. 3 Charakterystyki częstotliwościowe układu o różnych modelach odpowiedzi impulsowych
Następnym krokiem ku stworzeniu dokładniejszego modelu odpowiedzi impulsowej jest zastąpienie pojedynczego impulsu sygnałem w kształcie trójkąta. Kształt ten został przyjęty po porównaniu rzeczywistej odpowiedzi do „ciągu” trójkątów. Szerokość podstawy trójkąta założono na podstawie szerokości trójkątów rzeczywistej charakterystyki i ustalono jako sześć lub trzy punkty. Taką szerokość w przybliżeniu mają pierwsze trójkąty poszczególnych odpowiedzi impulsowych. Jak można zauważyć charakterystyki mają wspólne cechy z rzeczywistymi, analogiczne rozmieszczenie antyrezonansów i analogiczne zmiany dla obu szerokości podstaw przy odchylaniu punktu pomiarowego od osi głównej. Dla różnych szerokości różnicą jest tylko ich głębokość. Model impulsu w kształcie trójkąta zdecydowanie bardziej zbliżony jest do rzeczywistej odpowiedzi impulsowej. Nasuwa się tu spostrzeżenie że szerokość podstawy może odpowiadać filtrowi dolnoprzepustowemu o zmiennej częstotliwości odcięcia w zależności od szerokości podstawy. Im szersza podstawa tym niższa częstotliwość odcięcia.
Kolejnym rozwinięciem omawianego modelu to wprowadzenie zmiennej szerokości podstawy trójkąta. Można sobie wyobrazić głośnik jako filtr dolnoprzepustowy o zmiennej charakterystyce przy zmianie kąta odchylenia punku pomiarowego od osi głośnika. Im większe jest odchylenie od osi tym częstotliwość odcięcia przesuwa się w stronę niskich częstotliwości. Dlatego też takim filtrem może być omawiany impuls a dokładniej szerokość jego podstawy, co zauważono w poprzednim punkcie. Im szerokość podstawy większa tym częstotliwość odcięcia przesuwa się w stronę niskich częstotliwości. Na rys. 3 w czwartej kolumnie przedstawiono charakterystyki częstotliwościowe omawianego impulsu, gdzie zmianę szerokości podstawy trójkąta powiązano z odchyleniem punktu pomiarowego od osi głównej. Jak widać z wykresu powyższe założenie jest słuszne, ponieważ widać jak w miarę zwiększania się podstawy trójkąta „wycinane” są składowe o wyższych częstotliwościach.
Porównując wykresy przedstawiające charakterystyki układu głośników, dla których odpowiedź impulsową zamodelowano jako impulsy o kształcie trójkątów o zmiennej szerokości podstawy, można stwierdzić, że ten sposób zamodelowania jeszcze bardziej przypomina rzeczywiste charakterystyki. Analizując wykresy można stwierdzić, iż charakterystyki częstotliwościowe odpowiedzi impulsowych przejawiają cechy kierunkowości. Na wykresie można zauważyć obcinanie pasa wyższych częstotliwości wraz z odchylaniem się od osi głównej. Także widoczne jest zwiększanie się nierównomierności przy zmianie kąta odchylenia.
Wszystkie moduły mają możliwość zmiany wprowadzanych danych wejściowych, a przez to porównanie wpływu zmian między innymi geometrii, ilości źródeł itd. Jak wynika z wykresów zwiększenie odległości między głośnikami powoduje powstanie dodatkowych antyrezonansów i pogłębienie się już istniejących. Można też zaobserwować skracanie się pasma przenoszenia układu w kierunku niskich częstotliwości, także zwiększa się nierównomierność charakterystyki. Im większa jest odległość pomiędzy głośnikami tym charakterystyka częstotliwościowa wykazuje silniejszą tendencję do tłumienia wysokich częstotliwości. Mimo, że teoretycznie za pomocą zmiany odległości między głośnikami można wpływać na wygląd charakterystyki układy, to w praktyce jest to parametr stały i w wykonanych układach niemożliwy do modyfikacji. Program wprawdzie posiada możliwość zmiany zadanej odległości między głośnikami, ale zmiany te mają sens tylko w czasie symulacji przed wykonaniem rzeczywistego układu. W przypadku wykorzystania programu do sterowania charakterystyką kierunkową rzeczywistego układu będzie to parametr stały.
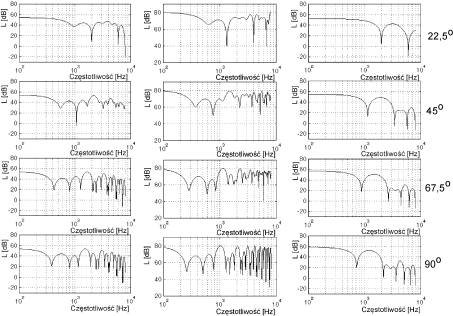
rys. 4 Charakterystyki częstotliwościowe układu kolejno: w pierwszej kolumnie podstawowego, drugiej o zwiększonej odległości pomiędzy głośnikami, w trzeciej o zmniejszonej ilości źródeł
Jak wynika z rys. 4 zwiększenie odległości między głośnikami powoduje powstanie dodatkowych antyrezonansów i pogłębienie się już istniejących. Można też zaobserwować skracanie się pasma przenoszenia układu w kierunku niskich częstotliwości, także zwiększa się nierównomierność charakterystyki. Im większa jest odległość pomiędzy głośnikami tym charakterystyka częstotliwościowa wykazuje silniejszą tendencję do tłumienia wysokich częstotliwości. Mimo, że teoretycznie za pomocą zmiany odległości między głośnikami można wpływać na wygląd charakterystyki układy, to w praktyce jest to parametr stały i w wykonanych układach niemożliwy do modyfikacji. Program wprawdzie posiada możliwość zmiany zadanej odległości między głośnikami, ale zmiany te mają sens tylko w czasie symulacji przed wykonaniem rzeczywistego układu. W przypadku wykorzystania programu do sterowania charakterystyką kierunkową rzeczywistego układu jest to parametr stały.
Układy o elementach mających te same parametry mogą różnić się ilością źródeł dźwięku. rys. 4 przedstawia charakterystyki częstotliwościowe układ o czterech głośnikach – w pierwszej kolumnie, a w trzeciej kolumnie o dwóch głośnikach. Z wykresów wynika, że wprowadzenie większej ilości głośników powoduje zawężanie się pasma przenoszenia od wysokich częstotliwości w kierunku niskich. Wraz ze zwiększeniem się ilości głośników charakterystyka częstotliwościowa układu posiada cechy coraz bardziej układu kierunkowego. W tym miejscu nasuwa się spostrzeżenie, że w praktyce lepiej jest, aby układ miał większą ilość głośników, ponieważ powstaje wtedy więcej możliwości regulacji charakterystyk tego układu.
WNIOSKI
Z badań wynika, że istnieje wyraźny związek zmiany charakterystyk układu ze zmianami amplitudy i fazy poszczególnych jego elementów. Zmiany fazy zdecydowanie w większym stopniu wpływają na zmianę charakterystyki kierunkowej, niż zmiany amplitudy. Można stwierdzić, że aby uzyskać żądany efekt kierunkowości należy regulować zmianą fazy poszczególnych elementów, a zmianą amplitudy można regulować głębokość antyrezonansów. Można stworzyć wielopunktowe źródło dźwięku o zadanej charakterystyce kierunkowej za pomocą techniki DSP.
Wykorzystując opisany program istnieje możliwość, przez zmianę charakterystyk pojedynczych źródeł dźwięku, wpływ na charakterystykę całego układu głośników. Program opisany w pracy ma możliwość symulacji określonych charakterystyk dzięki temu możemy bardzo prosto przewidzieć je bez budowania rzeczywistego układu.
Przedstawiony program można skompilować na kod wewnętrzny procesora DSP (asembler). Jako układ do wykonywania zadań tego programu wybrano zestaw procesor z kartą DSP56362EVM firmy Motorola.
Możliwości zmiany parametrów układu głośników w czasie rzeczywistym może być wykorzystane tam gdzie często zmieniają się warunki pracy takich urządzeń np. dworce. Także za pomocą takich urządzeń można z optymalizować warunki odsłuchu w takich obiektach jak kościoły, sale konferencyjne gdzie potrzebna jest określona charakterystyka w danym kierunku.
W przyszłości możemy oczekiwać pojawienia się masowo zestawów głośnikowych z procesorami DSP, które mają możliwość zmiany charakterystyk przez wprowadzanie różnic amplitudy, fazy, zakresów częstotliwości.
LITERATURA
Czajka Ireneusz, Olszewski Ryszard – Zagadnienie modelowania rzeczywistych źródeł dźwięku metodami numerycznymi
Gołaś Andrzej, Czajka Ireneusz (1999). Koncepcja źródła dźwięku o sterowanej charakterystyce kierunkowej. Materiały XLVI Otwartego Seminarium z Akustyki. Kraków-Zakopane str.389–392.
Łopacz Henryk (1999). Modele elementów odpowiedzi impulsowych pomieszczeń. Materiały XLVI Otwartego Seminarium z Akustyki. Kraków-Zakopane str. 57-66.
Marwen Craig, Ewers Gilian (1999). Zarys cyfrowego przetwarzania sygnałów. WKŁ
Richard G. Lyons (1999). Wprowadzenie do cyfrowego przetwarzania sygnałów. WKŁ
© 2002-2004 Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy www.anc.pl, www.ciop.pl



|
Klauzula RODO Dostępność cyfrowa Copyright © Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy Wszelkie prawa do udostępnianych utworów są zastrzeżone, z zastrzeżeniem wyłączenia tych utworów, które udostępniane są w trybie otwartego dostępu – na podstawie licencji Creative Commons CC-BY ND 4.0. Kopiowanie w celu rozpowszechniania fragmentów lub całości pozostałych materiałów jest zabronione. Udostępnione materiały można kopiować zarówno we fragmentach jak i w całości wyłącznie na użytek własny. |